三维立体视觉相关简介
2016-07-29技术资料
三维立体视觉测量系统主要功能有:现场系统标定;空间特征点距离三维测量;空间物体位置三维测量;空间运动体姿态的三维测量;特征点的自动识别定位等。其主要通过三维立体相机来获取相关信息。
三维立体相机与区别普通相机在于:三维立体相机具有两个以上的传感器,能够进行摄像机标定、立体匹配。
三维立体相机可分为三类:双目立体相机,三目立体相机以及多目立体相机。
双目立体相机成像原理如下图所示:
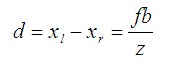
d :视差
f :焦点距离
b :基线BaseLine
z :纵向距离
其中BaseLine指2个Lens的中心距,对某一特定点进行三角测量。该点测量误差与两CCD光轴夹角是一复杂的函数关系;若两摄像头光轴夹角一定,则被测坐标与摄像头坐标系之间距离越大,测量得到点距离的误差就越大。在满足测量范围的前提下,应选择两CCD之间夹角在50℃~80℃之间。
由于三维立体视觉与人眼立体视觉相比,具有不可替代的优点,如精度高、扩展能力强大,连续工作时间长、不易损坏、保密性好、没有培训成本、结果易于保存和复制等优点。因此三维立体视觉技术的应用领域也越来越广泛,如三维环境感知与建模、机器人导航、物体跟踪与检测以及图像分割等。但其与人类的双目视觉水平还相距甚远,因此成为高校、研究机构以及相关企业的研究人员进一步深入研究的高新技术领域。