原子力显微镜的成像原理
2016-04-18技术资料
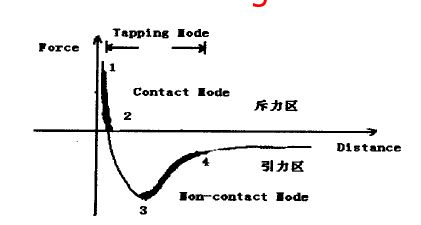
AFM是用一端固定而另一端装有纳米级针尖的弹性微悬臂来检测样品表面形貌的。当样品在针尖 下面扫描时,同距离密切相关的针尖-样品相互作用(见图3)就会引起微悬臂的形变。也就是说,微悬臂的形变是对样品-针尖相互作用的直接反映[1]。通过检测微悬臂产生的弹性形变量ΔZ,就可以根据微悬臂的弹性系数k和函数式F=k·ΔZ直接求出样品-针尖间相互作用F。AFM利用照射在悬臂尖端的激光束的反射接收来检测微悬臂的形变。由于光杠杆作用原理,即使小于0.01nm的微悬臂形变也可在光电检测器上产生10nm左右的激光点位移,由此产生的电压变化对应着微悬臂的形变量,通过一定的函数变换便可得到悬臂形变量的测量值[2]。当样品在XY平面内扫描时(对某一点其坐标为[x,y]),若保持样品在Z轴方向静止,且令探针的竖直初始位置为零,则可根据针尖-样品相互作用与间距的关系得到样品表面的高度变化信息Δh(x,y),即样品表面任意点(x,y)相对于初始位点的高度。对样品表面进行定域扫描便可得到此区域的表面形貌A=A(x,y,Δh(x,y))。
原子力显微镜的成像特点